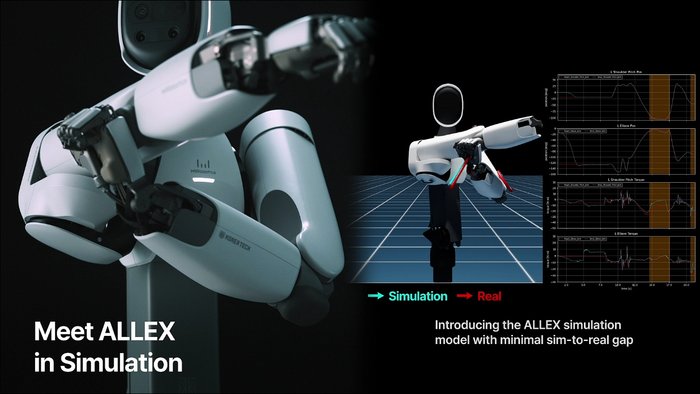
WIRobotics(ウィロボティクス)がヒューマノイドロボット「ALLEX(アレックス)」のシミュレーションモデルを公開した。開発者や研究者が実際のハードウェアなしにALLEXをベースとした制御・学習・合成データ生成を研究できるようにしたもので、同社が推進するオープン型Physical AI開発エコシステムの第一歩となる。
ロボティクス企業WIRoboticsは、ヒューマノイド開発過程で蓄積した核心技術を研究者・開発者に段階的に公開するロードマップに着手したと発表した。今回のシミュレーションモデルとあわせて、シミュレーションと実際のロボットの動作を比較したSim-to-Real(Simulation-to-Real)検証結果も公表した。
現実世界を認識・判断して行動するPhysical AIは、近年ロボット産業の次世代核心技術として注目されている。ヒューマノイド分野では、実際のロボットの特性を精密に反映したシミュレーション環境で学習と検証を行う開発手法が急速に広まっている。WIRoboticsがロボットのリリース前段階から外部研究者が参加するオープン型エコシステムを掲げた背景はここにある。
今回のALLEXシミュレーションモデルは、実際のロボットとシミュレーション間の差(Sim-to-Real Gap)を縮めることに重点を置いた。実際のALLEXが持つ高い逆駆動性(backdrivability)と力透明性(force transparency)を精密にモデリングし、実際のロボットがシミュレーションモデルと一致するReal-to-Sim特性を示すというのが同社の説明だ。公開されたモデルはMuJoCo用MJCF、Isaac Sim用USD、ROS用URDF形式で提供される。
WIRoboticsは実際のロボットとシミュレーション環境の整合性を検証した技術デモ映像も公式YouTubeチャネルに公開した。今後もヒューマノイド開発過程で積み上げた技術を段階的に公開し、Physical AI開発エコシステムを広げていく計画だ。
キム・ヨンジェWIRobotics代表は「ヒューマノイドロボット開発において、シミュレーションモデルは学習・検証・合成データ生成の出発点となる核心インフラだ」とし、「実際のロボットの特性を効果的に反映するシミュレーション環境が整備されてこそ、開発者がより速くアルゴリズムを検証し、実際のハードウェアへの適用可能性を高めることができる」と述べた。さらに「今年末にALLEX研究用プラットフォームを供給する予定だ」とし、「ALLEXシミュレーションモデルの公開を通じて、より多くの開発者が実際のハードウェアの普及前からALLEXベースの研究を始め、将来的に実際のロボットに研究成果を適用できる開発エコシステムを拡大していく」と付け加えた。
原文:https://platum.kr/archives/289980
関連記事はこちら👇