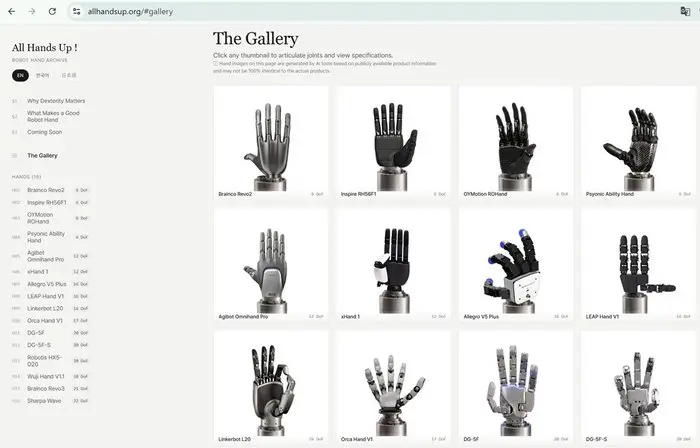
RLWRLD(リアルワールド)は、多関節ロボットハンド(Dexterous Robot Hand)の実運用データに基づき、設計特性と限界を分析するプラットフォーム「All Hands Up!」を公開した。このプラットフォームは、メーカーのスペックシートだけでは把握しにくいロボットハンドの実際の動作性能と設計上の相反関係(トレードオフ)を整理して提供する。
ロボットハンドはフィジカルAIの中核的な構成要素として位置づけられているが、サイズ・把持力・逆駆動性(Back-drivability)の間に存在する構造的な相反関係により、3つの性能を同時に満足させる製品はいまだ存在しない。サイズを小さくすると内部の駆動モーターが小型化され把持力が低下し、ギア比を上げて力を高めると外部衝撃に柔軟に対応する逆駆動性が低下するという構造的な限界がある。
RLWRLDはこうしたトレードオフを定量的に分析するため、独自ベンチマーク「DexBench(デックスベンチ)」を開発した。DexBenchは18種類の実世界における操作タスクを基準に各ロボットハンドの特性と限界を評価する指標であり、親指の可動域(Kapandji Scale)、指先の関節(Distal Interphalangeal joint)の独立駆動の可否、最小把持可能直径、ハンド外装素材の摩擦特性など、現場運用に影響を与える主要な設計変数を含んでいる。
同社は、完璧なロボットハンドがまだ存在しない現実を踏まえ、用途に応じてハードウェアを二元化する戦略も提示している。現場展開用(Type 1)は軽量性と耐久性を優先した構造であり、学習データ収集用(Type 2)はAI学習のための精密操作とデータ取得が可能なよう、高いバックドライバビリティと精度を備えた構造となっている。2つのタイプを相互補完的に活用する方式が現実的なアプローチであると、同社は説明する。
「All Hands Up!」は、URDF(ロボット記述標準フォーマット)に基づくインタラクティブな可視化機能も提供する。ユーザーは専用の専門プログラムを使用せず、Webブラウザ上でマウス操作のみでロボットハンドの各関節を動かし、把持形態の実現可否を確認できる。現在プラットフォームには10種以上の多関節ロボットハンドのデータが収録されており、実際のロボットシミュレーションおよび開発に活用可能なURDFデータも合わせて提供される。
RLWRLDのリュ・ジュンヒ代表は「All Hands Up!は単なる製品比較サイトではなく、ロボットハンド技術の実運用データを産業全体と共有するオープンプラットフォームだ」と述べ、「四半期ごとの定期的なコンテンツ更新を通じて、最新のロボットハンド実証データを継続的に蓄積していく計画だ」と明らかにした。さらに「メーカーは設計を検証し、研究者と産業パートナーはロボットハンド導入のための明確な基準を立てられるよう共通の基準点を提供し、ロボットハンド開発エコシステムの発展に貢献したい」と付け加えた。
原文:https://platum.kr/archives/289429
関連記事はこちら👇